
ソフトロボットグリッパ「PneuFinger」を中央大学中村研究室と共同開発
ミニトマトや布、1kgの容器など多種品目の把持を実現
|
2020.11.26
|
|
株式会社Pliant Robotics(本社:東京都渋谷区、代表取締役:車谷駿一、以下、Pliant Robotics)は、中央大学中村研究室(以下、中村研究室)と共同で多種品目把持を目的としたソフトロボットグリッパ「PneuFinger」を開発しました。PneuFingerは空圧アクチュエータで駆動し、空圧由来のコンプライアンス特性によって物体の形状に合わせたなじみ把持が可能です。なじみ把持によってミニトマトや卵といったやわらかいものや壊れやすいもの、布のような不定形物の把持を実現します。また、グリッパ本体は軽量ながらも1kgの容器を把持することができます。
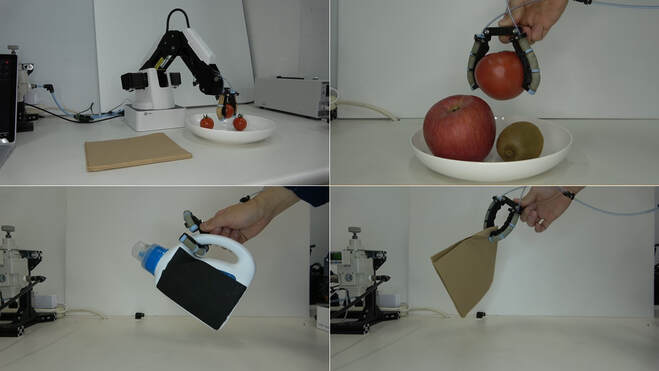
PneuFingerによる把持の様子(左上:ミニトマト、右上:果物、左下:洗剤容器(1kg)、右下:布)
多種品目を扱う農業や三品業界などではエンドエフェクタ性能のボトルネックによってロボット導入が難しいという課題がありましたが、PneuFingerにはこの問題を解決しうる把持性能が期待できます。Pliant Roboticsはロボットが活躍する分野をさらに広げるために、PneuFingerの産業応用に向けたさらなる研究開発を進めてまいります。
多種品目把持が可能なロボットグリッパにご興味のある方はこちらのフォームからお問い合わせください。
多種品目把持が可能なロボットグリッパにご興味のある方はこちらのフォームからお問い合わせください。
PneuFinger紹介動画
